Enhance robotic hand precision with our tactile sensing sheet
The 3-axis (XYZ) pressure sensor detects pressing force (pressure) and sliding force (frictional force).
With a thin and flexible film substrate thinner than 1mm, it can be comfortably fitted onto the surface of robotic hand fingers.
This film-type force sensor is ideal for measuring the gripping force of robotic hands.
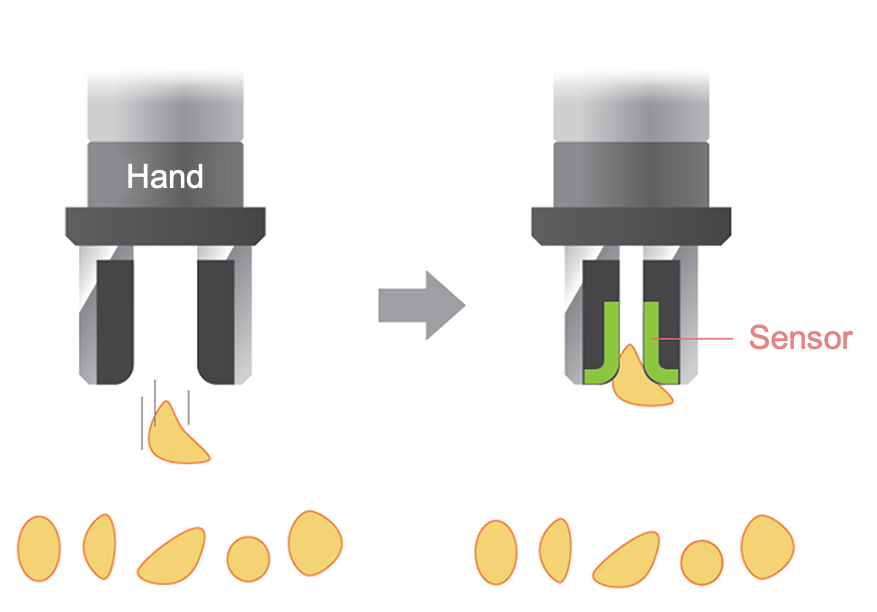
Detect friction between the hand and the objects and adjust grip strength to prevent a false release.
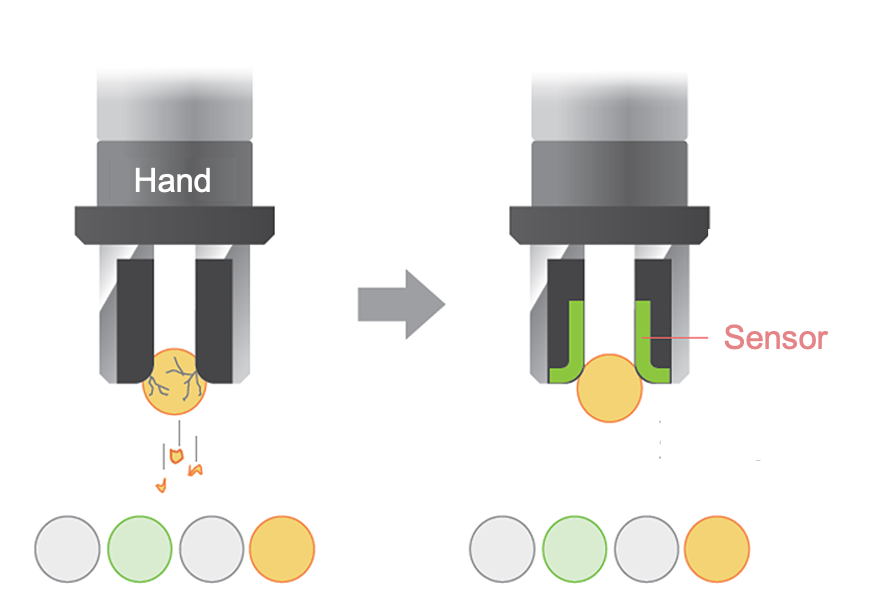
Sense rigidity (which cannot be detected by cameras) and prevent damage by adjusting grip strength.
It can quantitatively measure the direction and strength of the frictional force (lateral sliding force) applied to the sensor surface. By mounting it on a finger or a palm of a robot hand, it is possible to measure not only the force of gripping objects, but also the magnitude of motions such as twisting, pushing, and pulling.
Flexible bendable film sensors can be easily mounted on curved surfaces, including the fingertips and palms of robotic hands. Additionally, by forming a 3mm pitch array that supports multipoint detection at the same time, data of distribution and direction of pressure and frictional force between the robot hand and the gripped object can be acquired.
Please feel free to contact us for any questions or concerns.
Inquiry