フィルム型触覚センサー
押す力(圧力)と滑る力(摩擦力)を検出する3軸力覚センサーです。
厚さ1mm以下の薄くて柔軟なフィルムを基材に使用しているので、
ロボットハンドの指の表面に違和感なく実装することができます。
ロボットハンドの把持力を測定する触覚センサーに最適なフィルムタイプの力覚センサーです。
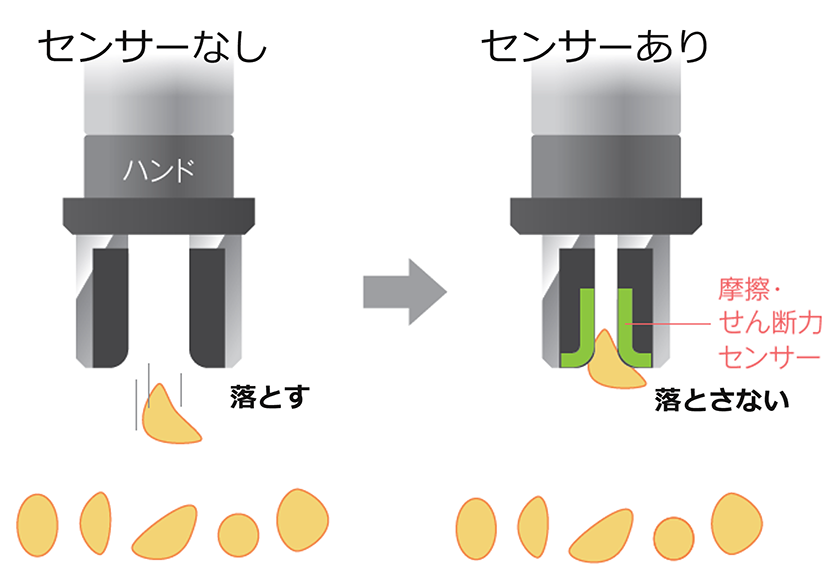
把持物との摩擦力をセンシングし、適切な把持力をかけることで落下を防ぐ
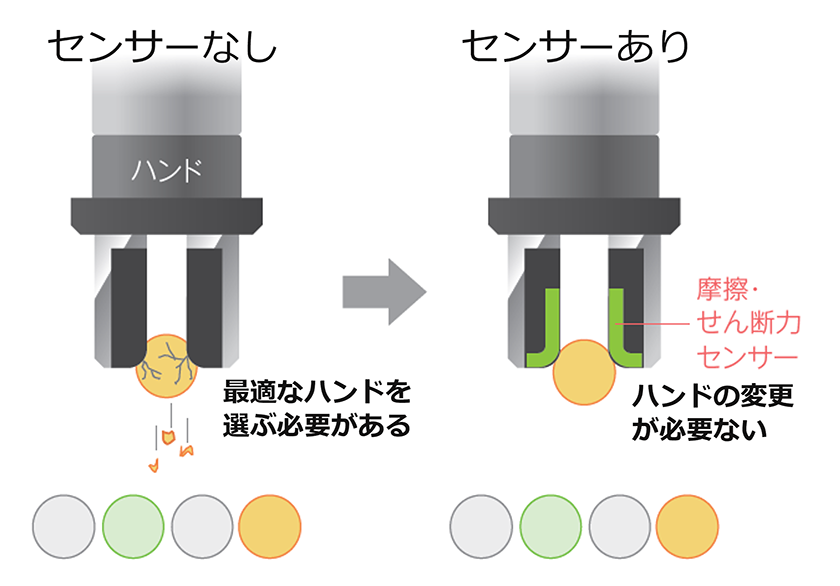
カメラで捉えられない”硬さ”をセンシングし、適切な把持力で把持物の破損を防ぐ
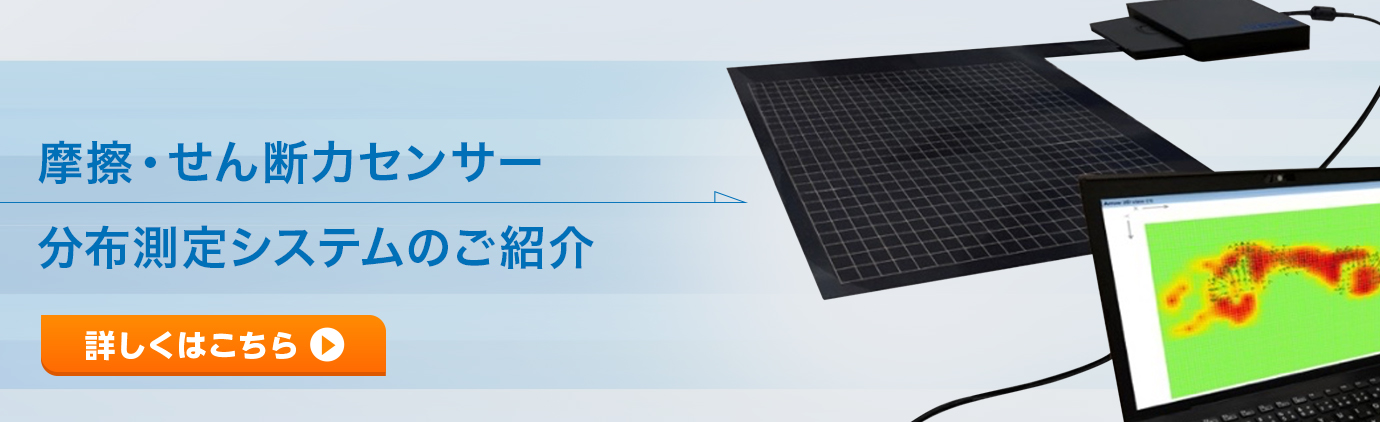
センサーの表面にかかる摩擦力(横に滑る力)の向きと強さを定量的に測定できます。
ロボットハンドの指や手のひら部に実装することで、把持した物を握る力だけでなく、”ねじる”、”押し込む”、”引っ張る”などの動作の大きさを測定することが可能になります。
柔軟に曲がるフィルム型触覚センサーは、曲面上に容易に実装が可能。ロボットの指先や手のひらなどの湾曲部にも貼付けて使用することができます。
また、フィルム上には多点同時検出に対応するアレイセンサーを形成することも可能です。
3mmピッチのマトリックス状にセンサーを構成することで、ロボットハンドの各部と把持物の間に生じる圧力や摩擦力の分布と向きの詳細なデータを取得することができます。
ロボットハンドへの応用 デモ動画
※イメージ画像です
ご要望に応じてサイズをカスタマイズします。
フィルムの厚さは1㎜以下で、測定部に貼り付けて使用することができます。また、NISSHAのフィルム型触覚センサーは印刷工法で製造しており、サイズや形状のカスタマイズに比較的容易に対応することができます。ロボットの指先、指の腹、手のひら部など、貼り付け位置に合わせたセンサーパターンをご提案することができます。
デモや製品、その他摩擦・せん断力センサーに関するご相談やご質問・ご意見は
お気軽にご連絡ください