5Gなどの通信技術の向上と共に、ロボットの遠隔操作のように「自分の体と同調させて操作をする」技術や、仮想空間でアバターを操作するといった「感覚をリアルに体験しながら操作する」技術へのニーズが高まってきています。
それによりデバイス開発の現場では、視覚だけではなく触覚の表現も求められています。
特に産業用ロボットの分野においては、作業性能を強化するために、ロボットが人間と同様の感触を得られるような触覚デバイスの研究開発が進められています。
触覚デバイスは、大きく分けて2種類に分類できます。一つ目は触覚を再現するもので、二つ目は触覚を検出するものです。
NISSHAでは触覚を検出できるデバイスであるフィルム状の力覚センサーを開発しています。そこで当記事では、触覚を検出する触覚デバイス、「触覚センシング」について主に紹介します。
Contents
触覚デバイスには、触覚フィードバックに関するものと、触覚センシングに関するものがあります。それぞれについて解説します。
触覚フィードバックとは、振動で触覚を表現する方法です。手指に振動を与えることで、触っている感覚を生み出します。
この技術は、例えばスマートフォンの画面上のボタンやポータブルゲーム機のパネルに採用されています。画面上を操作するだけでは物理的な感触は得られませんが、操作を検出した際に振動させることによって、実際に触れたような感触を与えることが可能です。
画面上で操作をしていることを知覚しやすくなり、ユーザーにとって利便性が向上します。
触覚センシングとは、手指で感じ取る感覚を数値化することです。人間が感じる触覚には、圧力、温度、接地面積、すべりなど、さまざまな感覚があります。このような感覚を数値化する技術を触覚センシングとよび、触覚センシングが可能なデバイスとしてさまざまな種類の触覚センサーが開発されています。
触覚センサーの用途は多岐にわたりますが、代表的な例としては工場で用いられている産業用のロボットハンドが挙げられます。
生産工場で人間が行っていた作業をロボットで代用するため、部品を掴む・はめ込むといった操作精度を高めるために触覚センサーが用いられています。
触覚センシング技術が今後ますます発展することで、人間にしかできない繊細な作業や熟練した職人の勘・コツが必要な作業をロボットが代用できるようになることが予想されます。
触覚センシングデバイスを用いた触覚の評価について、評価される具体的な指標と、評価に用いられるデバイスを紹介します。
触覚センシングデバイスは、一つの種類でさまざまな評価指標に対応するような汎用的なものはありません。用途ごとに、特定の評価指標に特化したデバイスが開発されているため、指標とデバイスの関連についても解説します。
関連資料
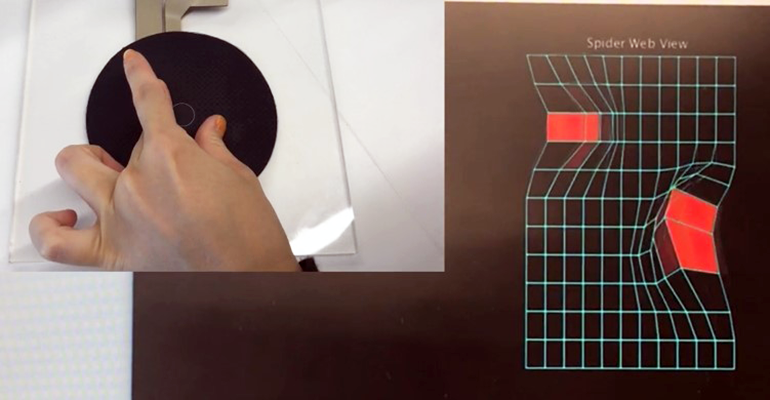
3軸力覚の面内分布測定
摩擦・せん断力センサーの製品カタログ/用途別事例集
▶︎ 資料をダウンロードする
触覚の評価指標(計測量)としては、接触、すべり、材質、近接などが挙げられます。分類方法は一般的な規定があるわけではありません。
そこで当記事では、以下のような分類で解説をします。
触覚の評価に使われるデバイスを、評価指標ごとに紹介します。
主に力覚センサーが挙げられます。力覚センサーには、電気抵抗式、静電容量式、圧電式、光学式などがあります。複数のセンサーを組み合わせることで、一つのセンサーではカバーできない曲面や大面積に対応したり、多軸の接触を検出したりすることが可能です。
こちらはすべり覚センサーが挙げられます。すべり覚センサーには、変異検出式、光学式、微振動・高周波検出式、負荷変化検出式などがあり、すべり振動や接触面の変化を検出できます。また、力覚センサーもうまく組み合わせることで、すべり評価に用いることが可能です。
硬度計(ひずみゲージなど)、温度センサーなどが挙げられます。また、複合要素の評価については、力覚センサーや振動センサーなどを組み合わせて使うことも可能です。
主に近接覚センサーが挙げられます。近接覚センサーには、光反射式、超音波反射式、静電容量式などがあり、ロボットの視覚を補助するような、広義の触覚センサーです。
触覚の評価指標とそれを検出するデバイスは、以下のようにまとめられます。
それぞれの評価指標を検出する際に、どのようなデバイスを採用できるのか、参考にしていただければと思います。
触覚を評価するデバイスの開発が進むにつれて、人間の感覚をロボットなどの機械に持たせることが可能になります。ロボットが触覚を得ることで、従来は人間にしかできないと考えられていた繊細な作業もロボットが代用できるようになると期待されています。
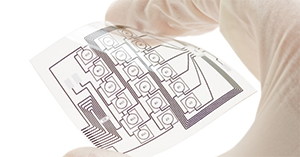
NISSHAでは、触覚を検出できるデバイスとして、フィルム状の力覚センサーを開発しています。フィルム状のセンサー表面に生じる圧力と摩擦力を多点的、多軸的に検出できるため、接触やすべりの検出・評価が可能です。
NISSHAのフィルムセンサーであれば、3軸の力覚センサーとすべり覚センサーを組み合わせたような複合的な機能をセンサー一つで実現することが可能です。複数のセンサーを組み合わせる必要はありません。
また、フィルム状で容易に変形できるため、狭いスペースへの搭載や曲面形状での検出にも対応可能です。
触覚デバイスの中でも特に、接触やすべり、材質の評価に対応したデバイスを探している場合には、NISSHAのフィルムセンサーがお役に立てる可能性がございます。まずはお気軽にお問い合わせください。
こんな記事も用意しています。
ユーザーインターフェースに新しい提案
摩擦力・せん断力とは NISSHAの摩擦・せん断力センサー技術
タクタイルとは?心地いい使用感や直感的な操作にかかせない性質
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください





")