モーメントとは、ある点を中心に物体を回転させるはたらきの大きさのことを指します。 「力の大きさ」×「中心点からの距離」で求めることができ、単位は「N・m」です。モーメントは、トルク、回転力、回す力、ねじる力などと呼ぶこともあります。車のタイヤ、機械内部で回動するローラー、ロボットアームなど、回転要素を持つ工業製品はモーメントを算出した上で設計されます。
このような製品の研究開発現場では、モーメントの測定に2軸、6軸のモーメントセンサー(多軸力覚センサー)を使用します。
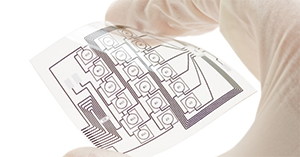
NISSHAでは、一般的な多軸力覚センサーとは異なるフィルムタイプの力覚センサー「摩擦・せん断力センサー」を開発しています。NISSHAの「摩擦・せん断力センサー」は、工場設備やロボットアームの駆動部分におけるモーメント測定に活用できると考えています。 今回の記事では、一般的な多軸力覚センサーと摩擦・せん断力センサーとの違いを紹介していきます。
Contents
モーメントセンサーには2軸力覚センサーと、6軸力覚センサーの2つのタイプがあります。
2軸力覚センサーとは、X軸とY軸の2軸の荷重と回転(モーメント)を検出するセンサーです。
6軸力覚センサーは、X、Y、Zの3方向の荷重と各軸まわりのモーメントを検出できます。
力覚センサーは、ひずみゲージなどを用いて荷重とモーメントを検出します。また、複数の方向の力を同時に検出する力覚センサーでは多軸干渉(※)が発生するため、正確に力の大きさと方向を測定するには補正する必要があります。
※多軸干渉:1方向から力を受けている場合に、別の軸に対しても荷重が測定されてしまう現象
NISSHAが開発した摩擦・せん断力センサーは、X、Y、Zの3軸の力を検出できるセンサーです。 一般的な力覚センサーとの大きな違いは次の2点です。
・シート状の柔軟なセンサーであること ・シート基材の上に複数の検出点がマトリックス状に設けられていること
基材シートに設けられた各検出点では、シートに接触する物体の押圧力(Z軸荷重)と、物体がシート上で動く際のX軸とY軸にかかる摩擦力を検出します。摩擦力は大きさだけでなく、物体が動く方向も検出可能です。
このX軸とY軸にかかる摩擦力の大きさと方向をマッピングする機能が、モーメントの測定にも活用できるのではないかと考えています。 さらにシート型であることは、ロボットアームの指先端部のような狭小部位や、研磨機の摩擦面でのモーメント測定に適していると考えています。
多指型ロボットアームでは、物体の把持状態を正確に検出することが重要です。そのため、力覚センサーは指先部に設置され、把持物と指先の間に働く押圧力やズレ(モーメント)を直接的に測定できることが望ましいと考えられます。しかし一般的な力覚センサーは指先に組み込むには嵩張ること、また丸い指先にフィットする形状でないことなどが課題となっています。
NISSHAの摩擦・せん断力センサーは柔軟なフィルム状のセンサーであり、サイズも比較的自由に設計ができます。そのため、ロボットの指先に貼り付けるように組み込むことが可能です。摩擦・せん断力センサーは、把持された物体の回転をX軸とY軸の力の向きと大きさで表現することができます。これによりモーメントの測定も可能だと考えています。
関連資料
3軸力覚の面内分布測定
摩擦・せん断力センサーの製品カタログ/用途別事例集
▶︎ 資料をダウンロードする
ここまで、モーメントを測定する多軸力覚センサーとNISSHAの摩擦・せん断力センサーとの違い。そして、摩擦・せん断力センサーによるモーメントセンサーとしての応用範囲を紹介しました。 摩擦・せん断力センサーは、ロボットアームの把持力測定や靴裏の応力分析などに活用できると考えています。
摩擦・せん断力センサーについてのさらに詳しい情報は製品webサイトで紹介していますので、是非ご覧ください。
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください