産業用ロボットや搬送用ロボットなど、製品を取り扱うロボットには必ずと言っていいほど「ロボットハンド」が搭載されています。
製品を適切に取り扱うために、ロボットハンドには多様な制約の下での操作が求められます。 落とさない、強く握りすぎない、回転させない、傷をつけない、精度良く位置決めするなど、その制約の内容はさまざまです。
さらに、生産効率を向上させるために今以上に高精度かつ高速でロボットハンドを操作したいという要望も増えてきています。
ここで注目を浴びているのが「画像処理技術」です。 「画像処理技術」は撮影した画像データを基に製品の形状や位置などの情報を読み取る技術です。この技術を応用することで、良品の判定や寸法測定、製品の位置決めなどの複雑な作業も自動化できるようになります。
例えば、ロボットハンドにカメラを搭載し、撮影した画像を基に製品をピックアップして搬送し、次工程に投入するといった作業を実現できます。
ただ、このカメラを用いた画像処理技術は「硬くて形状が定まっている製品」の取り扱いは得意ですが、「柔らかく形状が変化する製品」の取り扱いについては依然として技術課題が残っています。
そこで当記事では、カメラを搭載したロボットハンドについて、特徴やメリット・デメリットについて解説します。 さらに、上述の柔らかい製品に対する技術課題を解決する弊社の「フィルム型センサー」に関しても紹介いたします。
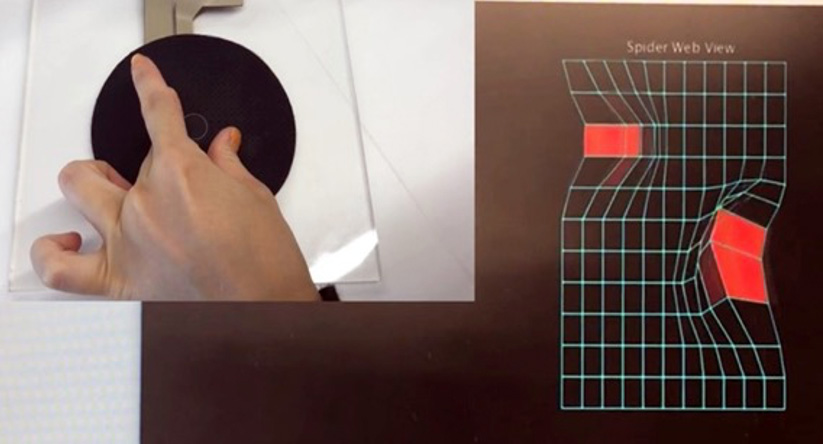
NISSHAのフィルム型センサー センサー表面に生じる圧力と摩擦力を多点的、多軸的に検出することで柔らかい製品を掴むことが可能
Contents
ロボットハンドにカメラを搭載する検討は、さまざまなメーカーで行われています。
一般的にカメラはロボットハンドの手首の部分に設置されます。 ロボットハンドの動作に影響を及ぼさない範囲で、なおかつできる限り近くで撮影できるという点で手首が適しています。
カメラをロボットハンドに直接搭載しない場合もあります。 例えば、カメラを架台に設置し、ロボットハンド全体と製品が見える状態で撮影するといったケースが考えられます。
搭載される設備の構成やスペックもさまざまなものが挙げられます。
一例をあげると、
といった組み合わせがあり、搭載されるカメラの画質も1種類ではなく、画素数の違いなどで幅広いラインナップがあります。
対象となる製品の形状や必要とされる処理速度など、用途に合わせて搭載するカメラの性能や構成を調整することが重要です。
ロボットハンドにカメラを搭載し、得られた画像情報を把持制御(製品を掴む制御)に使うメリットとして、次の2点が挙げられます。
1. 高精度な位置決めが可能 2. 作業速度の向上
ロボット制御でよく使われているのがティーチングによる位置制御です。 ティーチングはロボットに決まった動作をさせるのには向いていますが、掴む前に製品の向きを定める必要があったり、ティーチングに時間がかかったりと様々な課題があります。
一方、カメラを使った画像処理による制御では、カメラで撮影された画像から製品の形状や相対的な位置を認識することで、製品の個体差によって生じる微小なズレを自動で調整できるようになります。
例えば、ティーチングは座標指示で作業させるため、寸法誤差が生じやすい組み立て作業は難しいとされてきました。一方、画像処理制御を利用すれば位置決め穴など画像処理で認識させ、その穴を基準として次の動作を指定できるため、ティーチングでは難しかった作業を簡単に実現できるようになりました。
また、製品ごとに細かくティーチングを実施する必要がないため、一つのラインに複数の製品を流す「混流ライン」が実現できる点は、画像処理制御の大きなメリットといえます。
カメラを使った画像処理による制御の場合、画像から製品の位置や形状を認識できるため、フィードフォワード制御の精度を高めることができます。 ※フィードフォワード制御:制御を乱す恐れのある外的要因に対して、対象物への影響を最小限に抑えられるように先回りして対処する制御のこと
また、撮影処理された画像から製品の位置情報を取得し、その情報を基にロボットを素早く動かすことで、人間が作業する場合よりも作業時間を短縮できる場合があります。
例えば、バラ積みの中からある製品をピックアップする場合、100枚以上の取得画像の中から1秒以内でピックアップする製品の選定を行い、実行することができます。
このように、作業速度の向上によりタクトタイムを短縮できれば、時間あたりの生産数を増やせるため、コスト削減に繋がります。
ロボットハンドの制御にカメラを活用することは大きなメリットを得られる一方で、デメリットも存在します。
1. 対象物の硬さや変形予測ができない 2. カメラでは捉えられない死角が存在する 3. ハンド自体のサイズが大きくなる
カメラを使った画像処理制御も万能ではありません。
例えば、製品の硬さや掴んだときの変形具合を予測できなかったり、製品にかかる力は測定できないため、割れやすい製品の取り扱いには不向きです。
製品にかかっている力を知るためには「触覚センサー」を取り付ける必要があります。しかし、一般的な触覚センサーは金属性で厚みもあるため、ロボットハンドの小さい指には触覚センサーを搭載することが難しい場合があります。
弊社が開発しているような薄くフィルム状の触覚センサーであれば、ロボットの動作を阻害することなく自由に適用可能です。
カメラを架台やロボットハンドの手首の位置など、一か所に設置している場合、ロボットハンドや製品の形状によっては死角が生じます。
カメラで撮影できている範囲を把持する場合には問題ありませんが、製品の都合で死角となる部分をつかまざるを得ない場合、うまく把持できない可能性が高いです。
一方、死角をなくすために複数のカメラを設置した場合でも、その位置や角度によっては画像処理の難易度や負荷が高くなり、カメラの台数次第では高速・高精度の制御が実現できないケースも考えられます。
現在は小型カメラの開発などが進んでいるものの、複数台のカメラやプロジェクターをロボットハンドに設置するため、ハンド自体のサイズが大きくなってしまいます。
また、カメラの画像を通信するためのケーブルや電源線なども必要になるため、配線の取り回しに配慮をする必要があります。
以上をまとめると、カメラを搭載したロボットハンドには次のメリット・デメリットがあります。
NISSHAでは高精度な把持動作を実現するフィルム型のセンサーを開発しています。当センサーは、センサー表面に生じる圧力と摩擦力を多点的・多軸的に検出できます。
製品をつかむ際にかかる圧力を制御できるため、やわらかく変形するような製品にも対応可能です。また、圧力や摩擦力は多点で検出できるため、カメラにおける死角のような状態は存在しません。
フィルム型で柔軟な変形も可能なため、狭いスペースや曲面への搭載も可能です。省スペースで、ロボットハンドが大きくなってしまうことも避けられます。
ロボットハンドの適用範囲を拡大できるNISSHAのフィルムセンサーにご興味をお持ちいただけましたら、ぜひ一度ご相談ください。
こんな記事も用意しています。
ロボットに新たな感覚を付与する、NISSHAの触覚センサー
ロボットの進化に必須! 触覚センサーの種類と原理を解説
摩擦力・せん断力とは NISSHAの摩擦・せん断力センサー技術
フォースセンサー
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください