「ロボット」と聞くと硬い金属でできたイメージを思い浮かべる方が多いのではないでしょうか。 硬い材質のロボットは頑丈で変形しにくいため、精度が求められる産業用ロボットとして長く活躍してきました。
しかし、ロボットに硬い材質を用いることのデメリットも存在します。 その一例として、生産ラインで使用される「ロボットハンド」でのケースが挙げられます。
ロボットハンドで製品をピックアップする場合、製品が回転したり落下したりしないよう適切なポイントを強く掴まなければなりません。しかし、1つのラインで複数種の製品を取り扱ったりワークがバラ積みの場合、製品ごとに掴むポイントが異なるため、適切なポイントで掴むのに時間がかかったり、ポイントを探せない可能性がでてきます。
こうした課題の解決手段として最近注目が集まっているのが、「ソフトロボティクス」と呼ばれる柔らかい素材を使ったロボットの開発です。
先ほどのロボットハンドの例でも、ハンド部分に柔らかい材質を採用すれば製品を包むように掴めるため、どのような形状・積み方の対象物でも簡単に扱うことが可能です。 その他にも、硬いロボットではできなかった柔軟な動作を実現することができます。
この記事では、近年急速に開発が進められているソフトロボティクスについて、その特徴や具体的な事例、課題を解説します。
Contents
ソフトロボティクスとは、ソフトロボットを扱うロボット工学のことをいいます。
ソフトロボットには柔軟性のある素材が用いられており、生物のような柔らかい動きを再現することができます。これらの動きの多くは自然界に存在する動物、昆虫、植物などから着想を得ています。
こうした特徴を持つソフトロボットを活用することで、
など、これまでのロボットや人間にはできなかった作業が可能になります。
ソフトロボティクスの取り組み例として、ソフトハンドとミミズ型ロボットを紹介します。
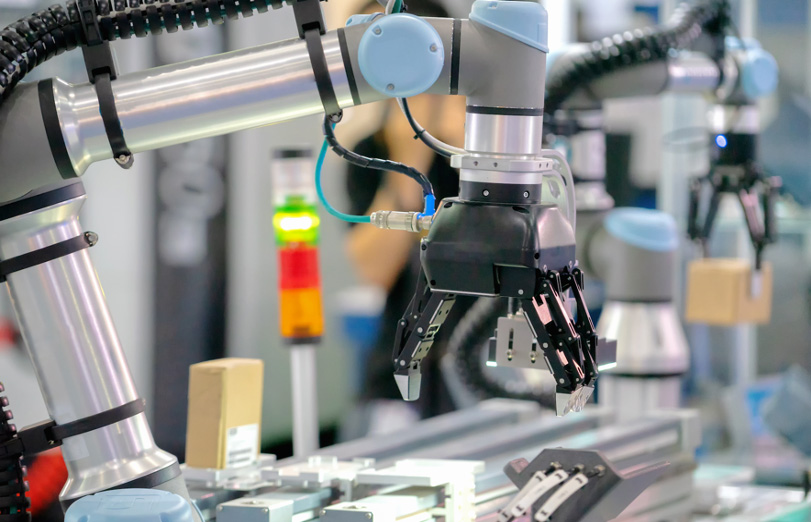
工場の生産ラインでは、ロボットハンドが多く使われています。
硬い材質のロボットハンドの場合、掴む対象物も金属や樹脂製で硬く、形状が決まっているものであれば精度良く掴むことができます。
しかし近年では、食品業界や物流業界を中心に、柔らかい製品の運搬にもロボットハンドを使いたいというニーズが増えてきました。硬いロボットハンドは製品を強く握ることは得意なのですが、人の手のように軽く掴むことには適していません。そのため、柔らかい製品を扱うと潰してしまうか極めてゆっくり掴むことしかできず、生産効率の面からも不適でした。
そのような課題を解決するために登場したのがソフトハンドです。 ソフトハンドはハンド自身が変形して、包むように製品を掴むことができるため、対象物を潰すことなく掴むことが可能になります。
米国では、食品の安全性を保障するFDAなどの規格に適応するソフトハンドロボットを開発するベンチャー企業も登場しています。
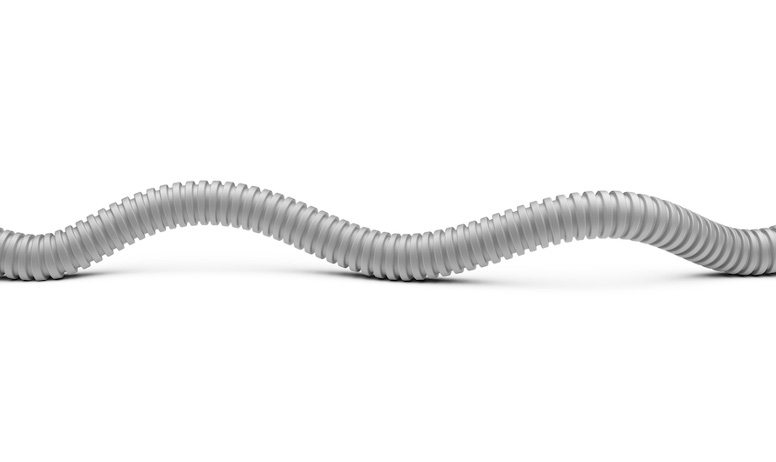
中央大学のバイオメカトロニクス研究室では、ミミズの蠕動運動(ぜんどううんどう)を模擬したロボットを開発しています。
蠕動運動とは、縦波の伸縮波を一定方向に進行させることで、対象物を移動させる運動のことです。移動に必要な空間が小さく接地面積が大きいため、安定して移動できます。
さらに、ミミズの内部は食道になっており、空洞があるといった特徴があります。
これらをロボットの構成にも適用し、
といった特長をもつ「ミミズ型ロボット」が開発されています。
主な用途例として、狭いダクトの清掃や配管内の検査、また災害現場における探索などが挙げられます。 さらに、自力で掘削できる特長を活かし、月の地中探査・海底下の探査など、人類が到達していない領域への活躍も期待されています。
参考:中央大学理工学部精密機械工学科 中村研究室 HP
ソフトロボティクスは応用性が高く、様々な用途に適用できるため急速に発展しています。 しかし、多様な技術領域が複雑に絡まっており、従来のロボットとは基本的な考え方が異なることから課題も多く存在します。
ソフトロボティクスが抱えている課題について、国立研究開発法人科学技術振興機構 研究開発戦略センターが定義している「ソフトネスプロダクション」と「ソフトインテリジェンス」を中心に解説します。
ソフトネスプロダクションは、「(ソフトロボットに求められるさまざまな特性を満たした上で)柔らかさをどう設計・実現するか」という考えです。
この領域において大きな課題となっているのは「材料開発」です。
ソフトロボティクスにおいて、使用する素材に求められるのは「柔らかさ」だけではありません。材料自体の特性がロボットの機能に大きく影響するため、生物的特性、電気的特性、化学的特性など、従来のロボットよりも厳しい要求があります。
そのため、ソフトロボットの各種仕様に応じて求められる特性と、柔らかさを両立できるような新たな材料の開発が求められています。
ソフトインテリジェンスは、「ロボットを使用環境や目的動作にどうやって適応させるか」という考えです。
これは、ソフトロボットの外皮の柔軟性や自由度の高い関節動作を使用目的に対して最適化する取り組みです。
たとえば、ミミズ型ロボットのような多関節ロボットで、関節の動作モデルの最適化を研究することなどが挙げられます。
近年ではディープラーニングなどのAI技術が発展し、ソフトロボットの分野でもモデリングや制御の研究に積極的に活用されています。
ソフトロボティクスはロボット学、生物学、機械学習・・・と複数の分野が絡み合っています。そのため、その他の課題としては様々な領域の研究者・技術者のコミュニケーションが従来以上に必要となった点が挙げられます。
こうしたコミュニケーションの強化のためには、異分野間での研究者の交流や産学連携を活用し、あらゆる観点からソフトロボットの開発を検討・試行できる体制を整えることが必要です。
その上で、常に「開発したソフトロボットをどう活用するか」を意識することが、今後のソフトロボットの進展に重要であると考えられます。
NISSHAでは、ソフトロボティクスに適用できるフィルム状の摩擦せん断センサーを開発しています。 薄く、柔軟性に優れているため、搭載範囲が限られるソフトロボットでもフレキシブルに設置できます。
また、力を点でなく面で検出し、ロボットの各部分と把持物の間に生じる圧力や摩擦力の分布と向きの詳細なデータを取得できるため、細かな制御に活用することが可能です。
ソフトロボティクスに適用できるNISSHAのフィルムセンサーにご興味をお持ちいただけましたら、ぜひ一度、ご相談ください。
こんな記事も用意しています。
ロボットに新たな感覚を付与する、NISSHAの触覚センサー
ロボットの進化に必須! 触覚センサーの種類と原理を解説
摩擦力・せん断力とは NISSHAの摩擦・せん断力センサー技術
圧力・摩擦力・せん断力を検出するNISSHAのフォースセンサー
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください