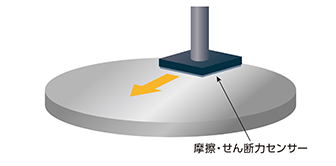
指で押し込んだ時に感じる物の弾力。手を横に滑らせたときに感じる、ひっかかるようなザラザラとした表面の質感。棒を引き抜こうとした時、手のひらに感じる皮膚が引っ張られるような力。人は何かに触った時、色々な感覚を受けます。
触覚センサーは、このような人が肌で感じる様々な力の変化を検出し、電気信号として伝えます。
触覚センサーを使うことで、人が肌で感じる力を検出して数値化し、目に見える形にできます。今、この触覚センサーをロボットの把持力のセンシングに応用する開発が進んでいます。
NISSHAはロボット技術に新しい価値を提案するフィルムタイプの触覚センサーを開発しました。
ここではロボット開発における触覚センサーの役割とNISSHAの触覚センサーの概要を紹介します。
Contents
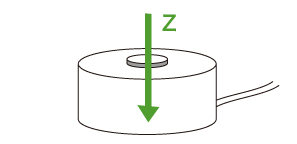
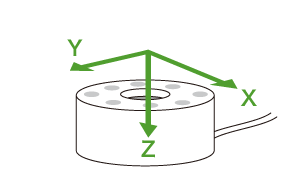
触覚センサーとして代表的なものに、3軸力覚センサーがあります。3軸力覚センサーはXYZ方向の力の変化を検出することで、センサーの表面にかかる押す力(圧力)や横に滑る力(摩擦力)の、向きや力の大きさを検出します。
3軸力覚センサーの例としては、ロードセルがあります。
ロードセルは、力に比例して変形する起歪体を持ち、起歪体の変形量を、ひずみゲージなどで測定することで、力の変化を電気信号として出力します。
1軸方向のみの力を検出するロードセルは棒状の起歪体ですが、XYZの3軸方向を計測するものは、円形形状などの起歪体と複数のひずみゲージにより力を検出します。
XYZの3軸方向に、軸周りの回転方向も加わった6軸方向の力の変化を検出できるものもあり、これにより平面方向の移動や、軸回りの回転における触覚を検知できます。
近年、人手不足の解消や、作業の省力化、人を介さないことによる品質の安定などを狙い、様々な場面でロボットが利用されています。
ロボットの中には、人の手と同じように、物を把持したり、引っ張ったり、回したりする手を持つものがあります。
そのようなロボットの手には、物を壊すことなく安全に触れるように各種のセンサーが備えられ、力を加減しながら物を動かしています。
ロボットに取り付けられたセンサー中でも、触覚センサーは非常に重要な役割を果たします。
把持した時に物にかかる力は、関節を動かすサーボモーターに発生する負荷などからも検出することができます。
しかし、物を把持して持ち上げようとする際に発生する、物と手の間の力(摩擦力)は指の先につけた触覚センサーでなければわかりません。また、物を把持する手は1点ではなく面で物に触れるので、面として力がどのように分布をしているかを知ることが求められます。
人の皮膚に広がる神経のように、センサーもロボットの手の表面に多数配置され、多点同時での力の検出をしなければなりません。
ロードセルのような3軸力覚センサーも触覚センサーとして機能しますが、ロードセルのような厚みや重さのある3軸力覚センサーは、比較的大きな装置で用いられています。ロボットの手のような小さく複雑な形状のものには取り付けられません。
また、センサー部を小さな場所に多数配置して、面で力を検知することもできません。
ロボットの手や指先には、薄く、フレキシブルで、多点同時検出できるような触覚センサーが必要になります。
それにより、人の手と同じように、圧力だけでなく摩擦力も感じながら、力を制御して物を把持することができるようになります。
NISSHAの触覚センサーは、圧力と摩擦力を検出するフィルム型の3軸力覚センサーです。
厚さ1mm以下の薄いフィルムを基材に使用しているので柔軟に曲がり、曲面上に容易に実装が可能です。ロボットの指先や手のひらなどの湾曲部にも貼付けて使用することができます。
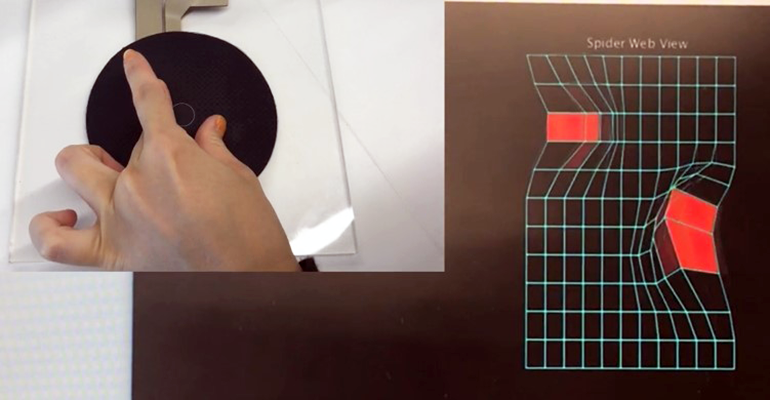
また、数mmピッチのマトリックス状にセンサーを構成することで、フィルム上には多点同時検出に対応するアレイセンサーを形成することも可能です。
これにより、力を点でなく面で検出し、ロボットハンドの各部と把持物の間に生じる、圧力や摩擦力の分布と向きの詳細なデータを取得することができます。
例えば、NISSHAの触覚センサーを、ロボットハンドの指先に貼り付けて使用すれば、把持したワークと指との間の滑りを測定することで、ワーク接合部の引張強度を測定することが可能になります。
柔らかいワークであれば、把持した指先にかかる力を測定することで、ワークがどの程度の柔らかさかを検出し、破損しないように持つことが出来ます。
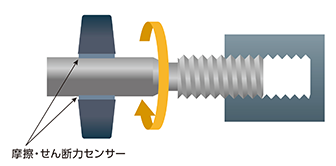
また、触覚センサーをつけたアームでワークを研磨する際、研磨材にかかる滑る力を測定すれば、研磨面の仕上がり状態を算出できます。指で把持したネジを回す際、ロボットの握力と指の滑りからトルクを算出することもできます。
NISSHAの触覚センサーで、ロボットの可能性が広がります。
NISSHAの触覚センサーは、ご要望に応じてサイズをカスタマイズします。
印刷工法で製造しており、サイズや形状のカスタマイズに比較的容易に対応することができます。
ロボットの指先、指の腹、手のひら部など、貼り付け位置に合わせたセンサーパターンをご提案することができます。お問い合わせフォームよりお気軽にお問い合わせください。
こんな記事も用意しています。
NISSHAのOEM・受託開発
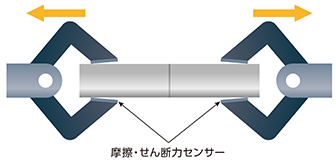
摩擦力・せん断力とは-NISSHAの摩擦・せん断力センサー技術
フィルム型圧力センサーの利点と用途を知る
フィルムディバイス開発や量産におけるご相談はお気軽にご連絡ください